Inertial 9 - DOF - BNO055

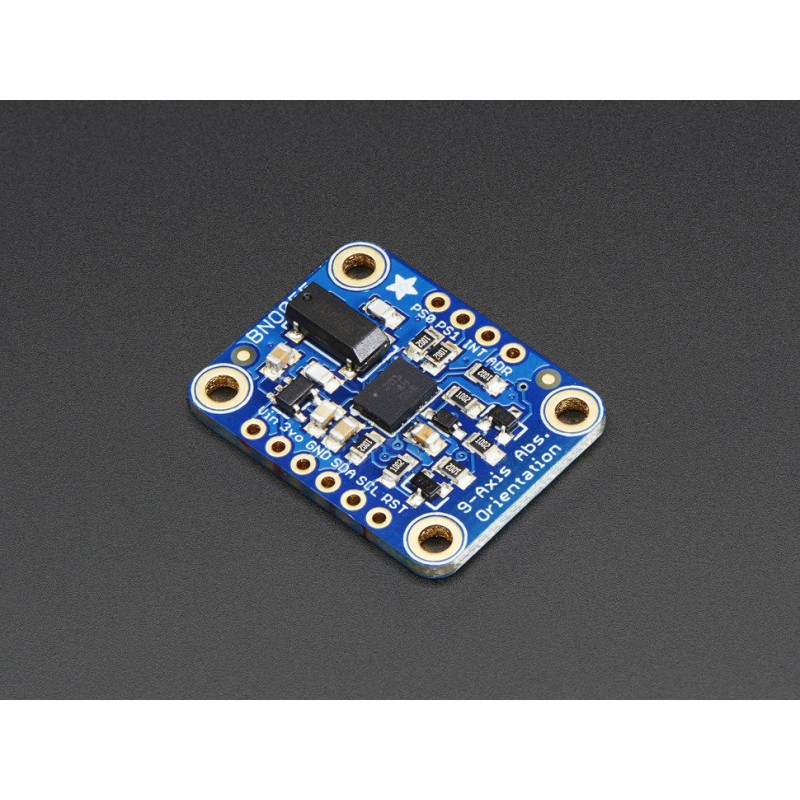
Inertial 9 - DOF - BNO055
ADA 2472
Inertial with absolute orientation output data.

Customers who bought this product also bought:
- Box for Arduino

- Adafruit Joy FeatherWing for all Feathers

- Mini Push-Pull Solenoid - 5V

- Adafruit SHARP Memory Display Breakout - 1.3" 168x144 Monochrome

- Shield relay V2

- Module Camera 8MP V2 for Raspberry PI

- Teensy 3.2 MK20DX256 + Headers

- Motor continuous current a DC - servo body

- Mini relay maintained FeatherWing - add-on for Feather card

More info
Description
If you have already ordered and used a 9 DOF sensor, it is likely you have also realized the challenge to transform data from the accelerometer, gyroscope and the magnetometer in true orientation in 3D space! The orientation is a difficult problem to solve. The algorithms of fusion of sensors (the secret sauce that mixes the accelerometer, magnetometer, and the gyro output of orientation data stable three-axis) can be difficult to calculate and implement in real time at low cost systems.
Bosch is the first to meet this challenge by taking a MEMS accelerometer, magnetometer, and a gyroscope and putting them on the same matrix with a processor ARM Cortex-M0 finally to digest all the sensor data high-speed, merge data with real-time requirements.
Rather than spending weeks or months to handle variable accuracy and complexity algorithms, you can get sensitive data in a few minutes thanks to the BNO055 - a smart sensor to 9 DOF that makes the fusion of sensor data alone! You can read the data directly on I2C.
The BNO055 can issue the following sensor data:
- Absolute orientation (Euler vector, 100 Hz) three-axis orientation of data on a sphere at 360 °
- Absolute orientation (Quaterion, 100 Hz) Quaternary output at four points for more precise manipulation of the data
- Vector of angular velocity (100 Hz) three axes 'speed' in rad / s
- Vector Acceleration (100 Hz) three axes of acceleration (gravity + linear motion) in m/s ^ 2
- Vector of magnetic field (20 Hz) three-axis detection of magnetic field in micro Tesla (uT)
- Vector linear acceleration (100 Hz) three axes linear acceleration (less gravity acceleration) in m/s ^ 2
- Vector of gravity (100 Hz) three axes of gravitational acceleration (less any movement) in m/s ^ 2
- (1 Hz) ambient temperature in degrees Celsius
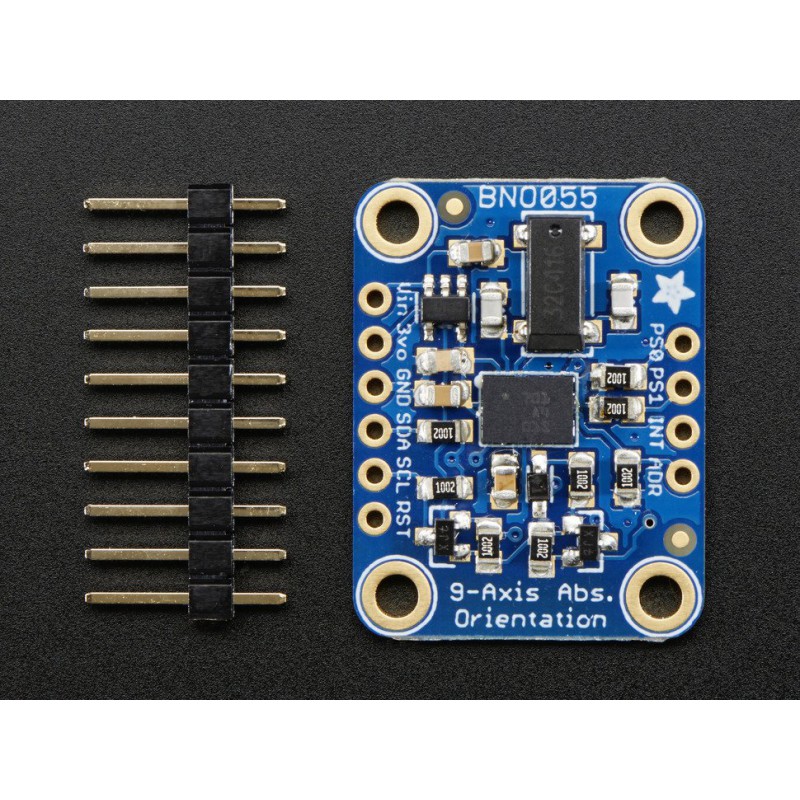
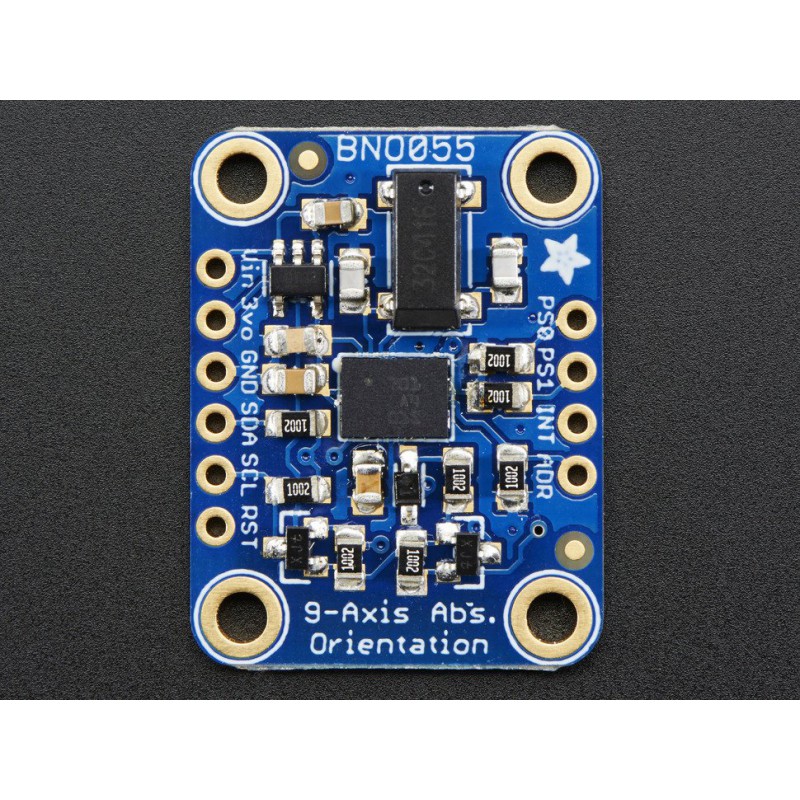
This sensor has its own regulator 3, 3V and adaptation level logic for Reset and I2C, pins as well as an external crystal 32, 768KHz (recommended for best performance) and certain other pins that you might find handy were wired.
Delivered assembled and tested, with no welded header connector.
Features
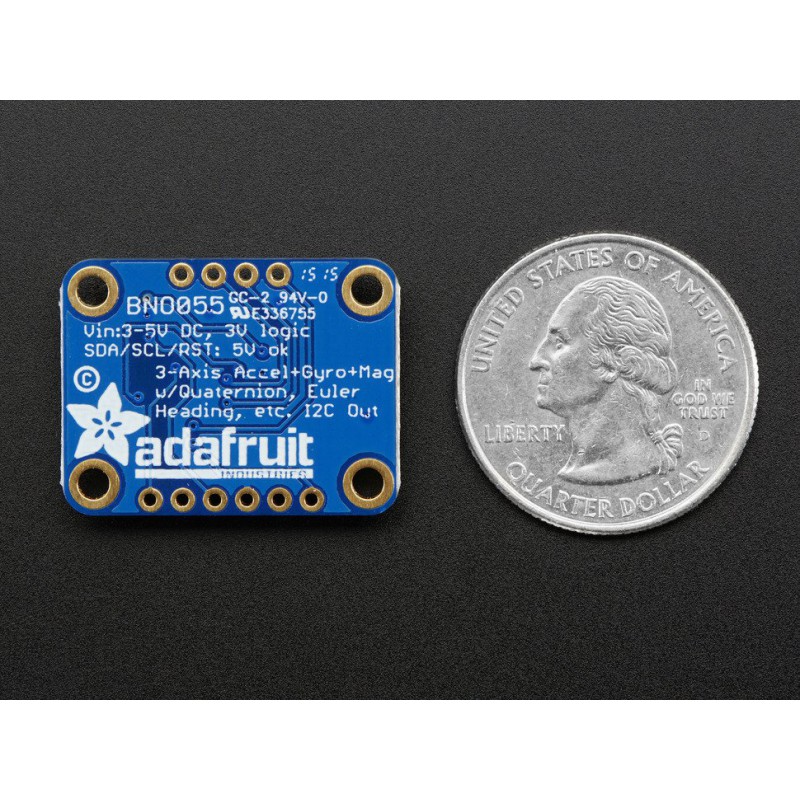
- Dimensions: 20mm x 27mm x 4mm / 0.8 "x 1.1" x 0.2 "
- Mounting holes: 20mm x 12mm gap
- Uses the I2C address 0 x 28 (pat default) or 0 x 29
- Weight: 3g
Accessories

MMA8451 - Accelerometer 3 axes
Map breakout at base of 3 accelerometer axis MMA8451 2/4 / 8g @ 14 - bit
9,54 € Add to cart- 17,94 € Add to cart
