Driver of continuous motor - step - A - TB6612 1.2


Driver of continuous motor - step - A - TB6612 1.2
ADA 2448
A drver d emoteur to drive a motor continuous or a motor not not 1, 2A.

Customers who bought this product also bought:
- Mono 2.5W Class D Audio Amplifiers - PAM8302
- Adafruit Perma-Proto Half - sized Breadboard PCB - Single

- ATMega328 with Arduino UNO bootloader

- Relay - Grove

- Module clock RTC - DS1307

- 10 X resistors 0.25W 9, 1Mohms

- Adafruit Trinket Pro 16 MHz 5V

- 10 X resistors 0.25W 150 ohms

- Micro-Switch hand switch three contacts

Sliding scale pricing
| Product | From (qty) | Price |
|---|---|---|
| Driver of continuous motor - step - A - TB6612 1.2 | 10 | 5,35 € |
More info
Description
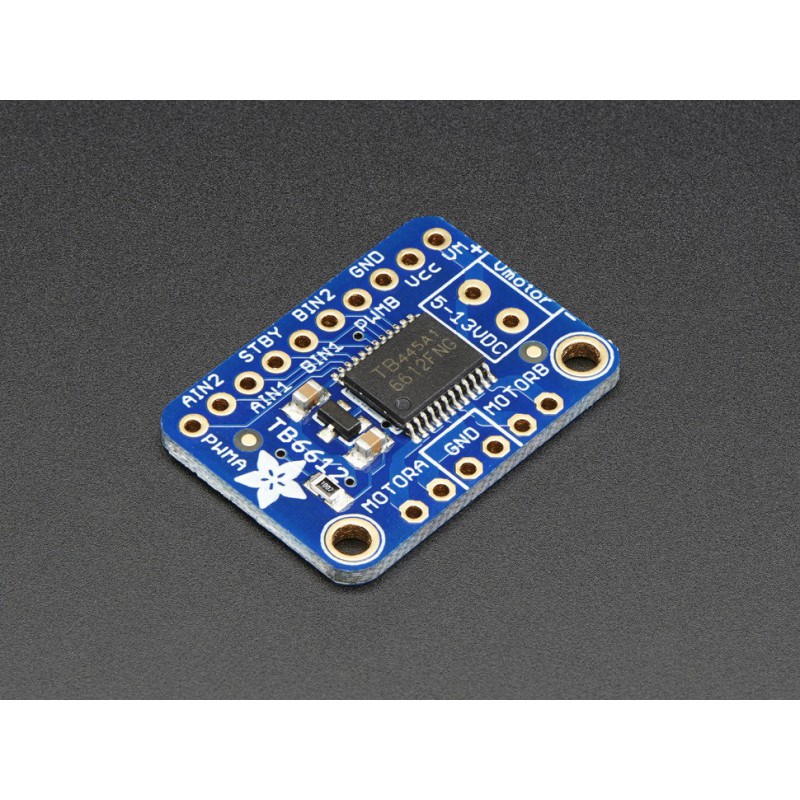
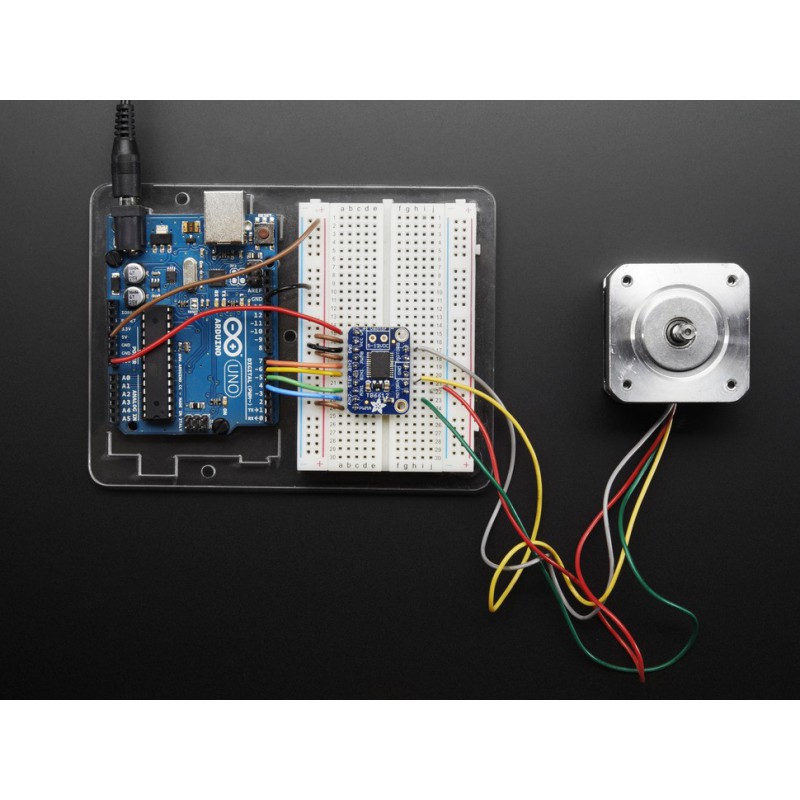
Drive 4 solenoids, 2 mteurs to current continuous or 1 motor stepper bipolar or uni-polaire with 1.2 has per channel (max 3 A point) with a driver of motor TB6612, this circuit is a dual H-bridge.
The TB6612 was welded on a map of breakout with a polarity protection type FET on the input voltage of the motor, and a pullup on the pine "stanby" resitance. This breakout comprent a double full H-bridge to control 4 solenoids, 2 motor continuous with reversal of rotation and a stepper motor, you have just to ensure it consumes less than 1.2 in roll on each channel, because it was the limit of the circuit, although it can support 3A for a short time. We particularly like this circuit as it has led to back integrated to protect your editing against all return flow associated with the inductance of the motor.
There are two pines of controlled H-bridge, one for each half bridge in H that accepts a pWM control, which allows to vary the rotation speed of the engine. This breakout works in logic between 2, 75V and 5V, so compatible 3, 3V and 5V. The power of the engine and isolated from the logic part part. Perfect for engines using a voltage between 4, 5V and 13, 5V, does not work with the smoteurs 3V.
Sold assembled and tested with a strip 1 X 16 connector solder.
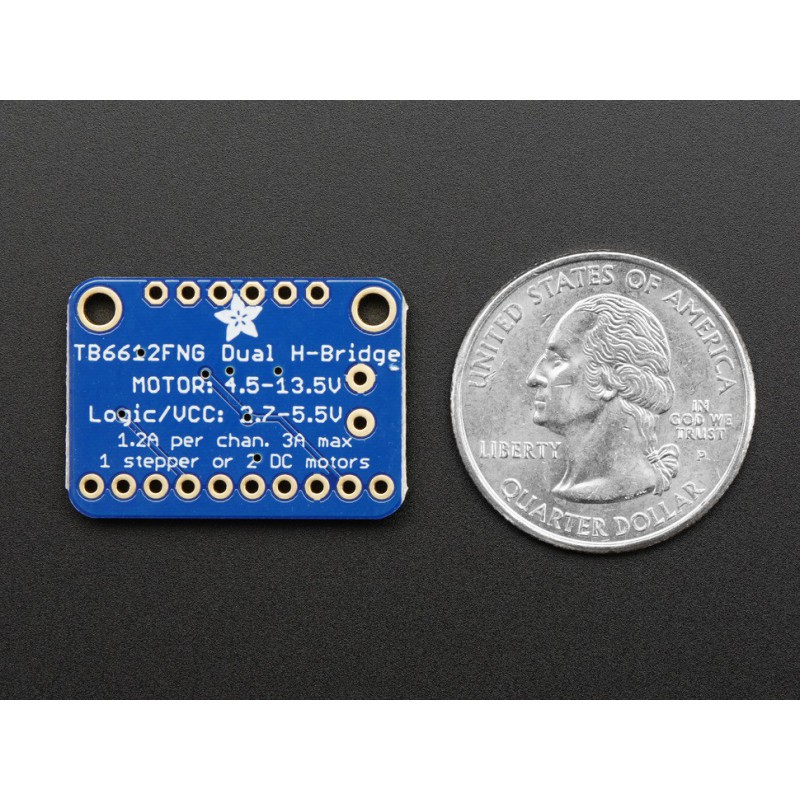
Features
- Current limit: 1.2 A, 3A max in pic
- Dimensions: 27mm x 19mm x 3mm / 1.1 "x 0.7" x 0.1 "
- Weight: 1.8 g
Documentation
Adafruit TB6612 1.2 has DC/Stepper Motor Driver Breakout Board
Accessories
- 5,94 € Add to cart
- 5,94 € Add to cart

